
本文简要描述zephyr在cortex-m下如何启动第一个thread和进行上下文切换。
原本没有打算分析zephyr的OS内核,但上周笔记本坏了,只能在台式机上看代码,因此大致看了一下上下文切换和调度的内容。现在买了新笔记本为了不辜负几个小时的读码时间,把看代码的心得也写了下来,果然是写文档的时间远远超过理解代码的时间。
本文基于nrf52832(arm cortex-m4)进行分析。上下文切换和芯片架构强相关,不同的芯片架构,寄存器,堆栈方式,中断使用都不一样,因此本文仅仅对cortex-m系列有较大参考价值。
启动第一个thread
在Zephyr如何运行到main一文中已经有提到zephyr的main函数是在main thread中被调用的,这里再详细分析zephyr如何切到main thread执行的。
编译配置项
相关代码基于下面定义进行分析1
2
3
4
5
6
7#define CONFIG_MULTITHREADING 1
#define CONFIG_ARCH_HAS_CUSTOM_SWAP_TO_MAIN 1
#define CONFIG_THREAD_STACK_INFO 1
#define CONFIG_ARCH_HAS_CUSTOM_SWAP_TO_MAIN 1
#define CONFIG_SCHED_DUMB 1
#define CONFIG_TIMESLICING 1
#define
流程
kernel/init.c 的_Cstart函数主要完成thread环境准备,并且到第一个thread执行1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23static struct k_thread _main_thread_s;
static struct k_thread _idle_thread_s;
k_tid_t const _main_thread = (k_tid_t)&_main_thread_s;
k_tid_t const _idle_thread = (k_tid_t)&_idle_thread_s;
FUNC_NORETURN void _Cstart(void)
{
struct k_thread *dummy_thread = NULL;
_IntLibInit(); //中断初始化
kernel_arch_init(); //于架构相关的初始化,主要是设置CPU的寄存器
//不依赖内核的驱动初始化
_sys_device_do_config_level(_SYS_INIT_LEVEL_PRE_KERNEL_1);
_sys_device_do_config_level(_SYS_INIT_LEVEL_PRE_KERNEL_2);
//初始化多thread环境,并创建main thread
prepare_multithreading(dummy_thread);
//切换到main thread
switch_to_main_thread();
}
创建Main thread
通过_setup_new_thread将bg_thread_main作为thread进行创建1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29static void prepare_multithreading(struct k_thread *dummy_thread)
{
ARG_UNUSED(dummy_thread);
dummy_thread->stack_info.start = 0;
dummy_thread->stack_info.size = 0;
//内核调度相关初始化
_sched_init();
//将main thread放入ready q
_ready_q.cache = _main_thread;
//创建main thread
_setup_new_thread(_main_thread, _main_stack,
MAIN_STACK_SIZE, bg_thread_main,
NULL, NULL, NULL,
CONFIG_MAIN_THREAD_PRIORITY, K_ESSENTIAL, "main");
//将main thread标记为start & ready
_mark_thread_as_started(_main_thread);
_ready_thread(_main_thread);
//创建idle thread
init_idle_thread(_idle_thread, _idle_stack);
_kernel.cpus[0].idle_thread = _idle_thread;
initialize_timeouts();
}
_setup_new_thread调用_new_thread创建main thread,主要就是对thread堆栈进行初始化,为上下文切换做准备1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69void _new_thread(struct k_thread *thread, k_thread_stack_t *stack,
size_t stackSize, k_thread_entry_t pEntry,
void *parameter1, void *parameter2, void *parameter3,
int priority, unsigned int options)
{
//获取堆栈地址
char *pStackMem = K_THREAD_STACK_BUFFER(stack);
_ASSERT_VALID_PRIO(priority, pEntry);
struct __esf *pInitCtx;
//对thread管理结构体进行初始化,在struct k_thread中保存main thread的优先级,堆栈信息,状态等
_new_thread_init(thread, pStackMem, stackEnd - pStackMem, priority,
options);
/* carve the thread entry struct from the "base" of the stack */
//在堆栈的底部准备上下文信息
pInitCtx = (struct __esf *)(STACK_ROUND_DOWN(stackEnd -
sizeof(struct __esf)));
//PC为
pInitCtx->pc = (u32_t)_thread_entry; //将_thread_entry放入堆栈中PC所在位置,上下文切换时_thread_entry为被pop到PC执行,在_thread_entry内调用main thread的入口函数
/* force ARM mode by clearing LSB of address */
pInitCtx->pc &= 0xfffffffe;
//将Main thread入口函数和入口函数的3个参数做为_thread_entry的4个参数放入堆栈中a1~a4位置,上下文切换时这四个参数会被pop到r0~r3作为thread_entry的参数
pInitCtx->a1 = (u32_t)pEntry;
pInitCtx->a2 = (u32_t)parameter1;
pInitCtx->a3 = (u32_t)parameter2;
pInitCtx->a4 = (u32_t)parameter3;
pInitCtx->xpsr =
0x01000000UL; /* clear all, thumb bit is 1, even if RO */
thread->callee_saved.psp = (u32_t)pInitCtx;
thread->arch.basepri = 0;
}
FUNC_NORETURN void _thread_entry(k_thread_entry_t entry,
void *p1, void *p2, void *p3)
{
entry(p1, p2, p3);
k_thread_abort(k_current_get());
CODE_UNREACHABLE;
}
struct __esf {
sys_define_gpr_with_alias(a1, r0);
sys_define_gpr_with_alias(a2, r1);
sys_define_gpr_with_alias(a3, r2);
sys_define_gpr_with_alias(a4, r3);
sys_define_gpr_with_alias(ip, r12);
sys_define_gpr_with_alias(lr, r14);
sys_define_gpr_with_alias(pc, r15);
u32_t xpsr;
};
struct _callee_saved {
u32_t v1; /* r4 */
u32_t v2; /* r5 */
u32_t v3; /* r6 */
u32_t v4; /* r7 */
u32_t v5; /* r8 */
u32_t v6; /* r9 */
u32_t v7; /* r10 */
u32_t v8; /* r11 */
u32_t psp; /* r13 */
};
经过上述步骤thread&stack如下: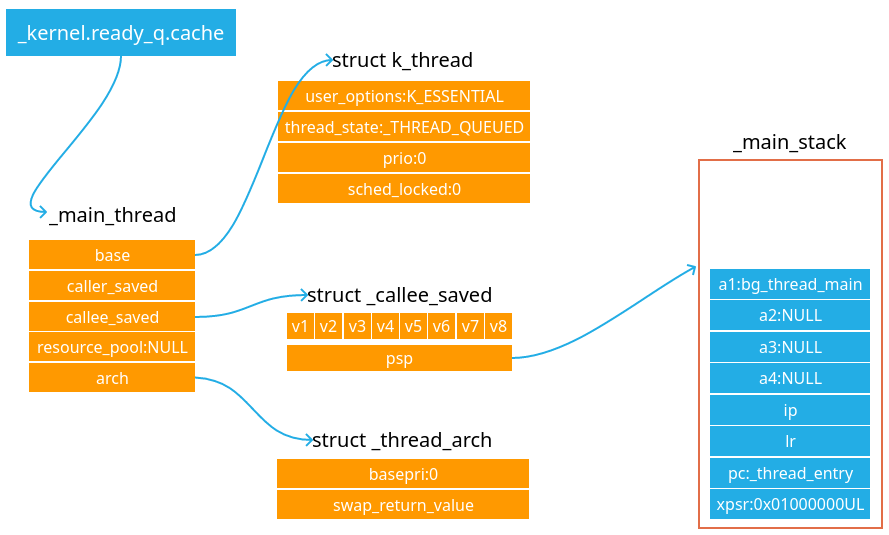
说明: 对于Cortex-M内核,中断发生时硬件会自动保存r0~r3,ip,lr,pc,xpsr因此_caller_saved不使用也无需初始化。一般情況下对于刚创建的thread来说这些值需要软件到堆栈也就是struct __esf,当Swap第一次调度时会从这里pop出开始执行。但对于一些架构(本文分析的cortex-m)无法直接通过swap进行第一个thread首次切换,就需要配置CONFIG_ARCH_HAS_CUSTOM_SWAP_TO_MAIN,进行第一个thread首次切换。
切到Main thread运行
switch_to_main_thread->_arch_switch_to_main_thread
配置有CONFIG_ARCH_HAS_CUSTOM_SWAP_TO_MAIN的首次切换如下,可以看到是直接将堆栈地址放到PSP,然后bx跳到_thread_entry执行1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39static ALWAYS_INLINE void
_arch_switch_to_main_thread(struct k_thread *main_thread,
k_thread_stack_t *main_stack,
size_t main_stack_size, k_thread_entry_t _main)
{
/* get high address of the stack, i.e. its start (stack grows down) */
char *start_of_main_stack;
//计算main thread堆栈地址
start_of_main_stack =
K_THREAD_STACK_BUFFER(main_stack) + main_stack_size -
MPU_GUARD_ALIGN_AND_SIZE;
start_of_main_stack = (void *)STACK_ROUND_DOWN(start_of_main_stack);
_current = main_thread;
__asm__ __volatile__(
/* move to main() thread stack */
"msr PSP, %0 \t\n" //psp指向main thread stack
/* unlock interrupts */
"cpsie if \t\n"
"movs %%r1, #0 \n\t"
"msr BASEPRI, %%r1 \n\t"
/* branch to _thread_entry(_main, 0, 0, 0) * /
"mov %%r0, %1 \n\t" //设置第一个参数为main thread入口函数
"bx %2 \t\n" //调用_thread_entry,正式进入main thread运行
:
: "r"(start_of_main_stack),
"r"(_main), "r"(_thread_entry),
"r"(main_thread)
: "r0", "r1", "sp"
);
CODE_UNREACHABL
上下文切换
第一个thread启动后,又可以继续创建其它thread,然后通过上下文切换让其它thread被调度运行
上下文切换方式
上下文切换方式有两种
- thread中主动让CPU PendSV,发生调度
- IRQ退出时,重新调度
下面分别说明
PendSV
PendSV上下文切换大体也分两类:
- 所有内核组件启动,等待,释放时会发生上下文切换,可以搜索_reschedule查看具体在那些地方。
- Thread被sleep,yield,suspend,abort时会发生上下文切换。可搜索_Swap查看具体在那些地方。
_reschedule其实也是调用_Swap来完成, 最终是通过写ICSR进入PendSV来完成上下文切换1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23static inline int _Swap(unsigned int key)
{
int ret;
_check_stack_sentinel();
ret = __swap(key);
return ret;
}
int __swap(int key)
{
/* store off key and return value */
_current->arch.basepri = key;
_current->arch.swap_return_value = _k_neg_eagain;
/* set pending bit to make sure we will take a PendSV exception */
SCB->ICSR |= SCB_ICSR_PENDSVSET_Msk;
/* clear mask or enable all irqs to take a pendsv */
irq_unlock(0);
return _current->arch.swap_return_value;
}
__swap触发pendsv后进入pendsv执行代码在arch/arm/core/swap_helper.S,简化如下1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68SECTION_FUNC(TEXT, __pendsv)
/* protect the kernel state while we play with the thread lists */
movs.n r0, #_EXC_IRQ_DEFAULT_PRIO
msr BASEPRI, r0
/* load _kernel into r1 and current k_thread into r2 */
//获取当前正在运行thread的_kernel->cpus[0].current 地址放入到r2中
ldr r1, =_kernel
ldr r2, [r1, #_kernel_offset_to_current]
/* addr of callee-saved regs in thread in r0 */
//将当前thread的_kernel->cpus[0].current->callee_saved地址放入r0
ldr r0, =_thread_offset_to_callee_saved
add r0, r2
/* save callee-saved + psp in thread */
//将寄存器v1~v8,sp保存在当前thread的callee_saved中(_kernel->cpus[0].current->callee_saved)
mrs ip, PSP
stmia r0, {v1-v8, ip}
/*
* Prepare to clear PendSV with interrupts unlocked, but
* don't clear it yet. PendSV must not be cleared until
* the new thread is context-switched in since all decisions
* to pend PendSV have been taken with the current kernel
* state and this is what we're handling currently.
*/
ldr v4, =_SCS_ICSR
ldr v3, =_SCS_ICSR_UNPENDSV
/* _kernel is still in r1 */
/* fetch the thread to run from the ready queue cache */
//取出将要执行的thread,_kernel->ready_q放到r2中
ldr r2, [r1, _kernel_offset_to_ready_q_cache]
//让_kernel->cpus[0].current指向将要执行的thread(在r2中)
str r2, [r1, #_kernel_offset_to_current]
/*
* Clear PendSV so that if another interrupt comes in and
* decides, with the new kernel state baseed on the new thread
* being context-switched in, that it needs to reschedules, it
* will take, but that previously pended PendSVs do not take,
* since they were based on the previous kernel state and this
* has been handled.
*/
/* _SCS_ICSR is still in v4 and _SCS_ICSR_UNPENDSV in v3 */
str v3, [v4, #0]
/* Restore previous interrupt disable state (irq_lock key) */
ldr r0, [r2, #_thread_offset_to_basepri]
movs.n r3, #0
str r3, [r2, #_thread_offset_to_basepri]
/* restore BASEPRI for the incoming thread */
msr BASEPRI, r0
/* load callee-saved + psp from thread */
//获取将要执行thread的callee_saved,并将其放入v1-v8和sp寄存器中,到此sp指针已经指向新的thread stack
add r0, r2, #_thread_offset_to_callee_saved
ldmia r0, {v1-v8, ip}
msr PSP, ip
/* exc return */
//退出中断处理,退出时硬件会将新thread stack中保存的r0~r3,ip,lr,pc,xpsr弹出,从而恢复新thread上下文开始执行
bx lr
以上流程如下图: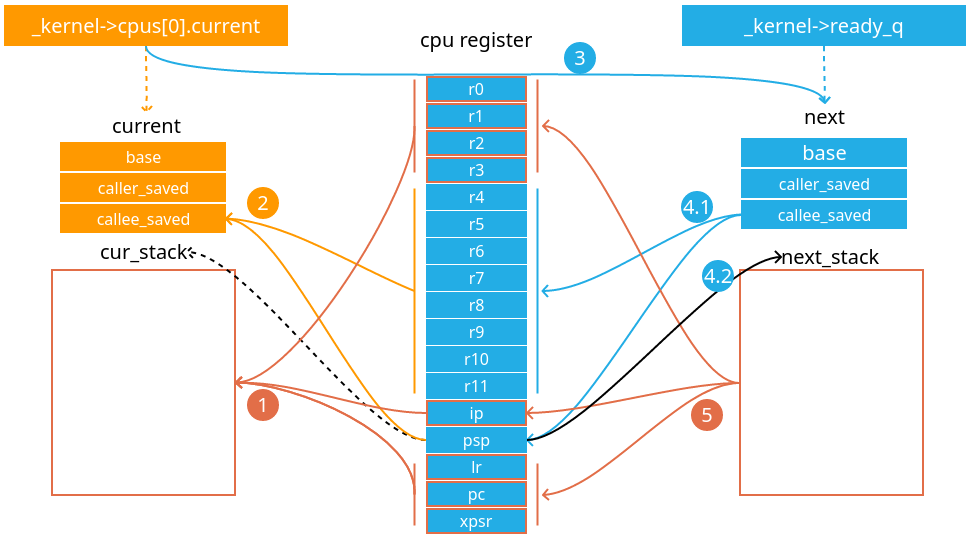
- 中断pendsv发生,硬件入栈r0~r3,ip,lr,pc,xpsr
- 软件保存r4~r11,psp到当前thread的callee_saved
- 改变当前thread指针指向将要执行的thread
- 软件从将要执行的thread弹出callee_saved到r4~r11,psp,堆栈指针指向将要执行的thread
- 退出中断pendsv,硬件自动从将要执行的thread stack中弹出r0~r3,ip,lr,pc
IRQ
在IRQ响应时执行_isr_wrapper,退出时呼叫_IntExit,该函数会进行上下文切换arch/arm/core/exc_exit.S
如果配置了CONFIG_TIMESLICING,会在每个时间片进行调度检查1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22SECTION_SUBSEC_FUNC(TEXT, _HandlerModeExit, _IntExit)
SECTION_SUBSEC_FUNC(TEXT, _HandlerModeExit, _ExcExit)
ldr r0, =_kernel
// r1放置当前thread
ldr r1, [r0, #_kernel_offset_to_current]
// r0放置将要调度的thread
ldr r0, [r0, _kernel_offset_to_ready_q_cache]
//比较二者不一致,进行调度
cmp r0, r1
beq _EXIT_EXC
/* context switch required, pend the PendSV exception */
// 需要调度,启动pendsv,进入pendsv中断执行上下文切换
ldr r1, =_SCS_ICSR
ldr r2, =_SCS_ICSR_PENDSV
str r2, [r1]
_ExcExitWithGdbStub:
_EXIT_EXC:
pop {lr}
bx lr
调度简述
本文不做调度分析,就目前用到的调度进行简单说明
优先级调度
zephyr os优先级调度支持下面三种调度方式
- CONFIG_SCHED_DUMB: 使用thread比较少的情况,不使用红黑树,可以节约2k的code size
- CONFIG_SCHED_SCALABLE:适用于thread比较多(>20),将适用红黑树
- CONFIG_SCHED_MULTIQ:1.12版本前默认的调度方式
调度算法主要体现在:
_priq_run_add/_priq_run_remove/_priq_run_best
时间片
相同优先级之间如果不支持时间片,就需要主动释放资源才能让其它thread运行,配置为启动时间片,在nrf52832下是使用的rtc1做为时间片定时中断
初始化中断
drivers/timer/sys_clock_init.c1
2SYS_DEVICE_DEFINE("sys_clock", z_clock_driver_init, z_clock_device_ctrl,
PRE_KERNEL_2, CONFIG_SYSTEM_CLOCK_INIT_PRIORITY);
drivers/timer/nrf_rtc_timer.c1
2int z_clock_driver_init(struct device *device)
{
NVIC_ClearPendingIRQ(NRF5_IRQ_RTC1_IRQn);
IRQ_CONNECT(NRF5_IRQ_RTC1_IRQn, 1, rtc1_nrf5_isr, 0, 0);
irq_enable(NRF5_IRQ_RTC1_IRQn);
1
}
中断向量表
软件中断向量表,会在IRQ发生时被IRQ中断软件查询使用
tests/kernel/arm_irq_vector_table/src/arm_irq_vector_table.c1
2
3
4
5
6
7void rtc1_nrf5_isr(void);
typedef void (*vth)(void); /* Vector Table Handler */
vth __irq_vector_table _irq_vector_table[RTC1_IRQn + 1] = {
isr0, isr1, isr2,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
rtc1_nrf5_isr
};
上面的_irq_vector_table会被arch/common/gen_isr_tables.py转换为_sw_isr_table
中断函数
arch/arm/core/isr_wrapper.S 响应中断访问软件中断向量表1
2
3
4
5
6
7
8
9SECTION_FUNC(TEXT, _isr_wrapper)
ldr r1, =_sw_isr_table
add r1, r1, r0 /* table entry: ISRs must have their MSB set to stay
* in thumb mode */
ldm r1!,{r0,r3} /* arg in r0, ISR in r3 */
blx r3 /* call ISR */
b _IntExit
当发生RTC中断时会查询出rtc1_nrf5_isr进行执行,按照下面顺序调用
rtc1_nrf5_isr->rtc_announce_set_next->z_clock_announce->z_time_slice
在z_time_slice进行时间片的计算,并出下一个要执行的thread1
2
3
4
5
6
7
8
9
10
11void z_time_slice(int ticks)
{
if (slice_time && sliceable(_current)) {
if (ticks >= _current_cpu->slice_ticks) {
_move_thread_to_end_of_prio_q(_current);
reset_time_slice();
} else {
_current_cpu->slice_ticks -= ticks; //当前thread时间片扣除
}
}
}
当时间片用完后还是通过_priq_run_remove/_priq_run_remove来计算出将要调度的thread1
2
3
4
5
6
7
8
9void _move_thread_to_end_of_prio_q(struct k_thread *thread)
{
LOCKED(&sched_lock) {
_priq_run_remove(&_kernel.ready_q.runq, thread);
_priq_run_remove(&_kernel.ready_q.runq, thread);
_mark_thread_as_queued(thread);
update_cache(thread == _current);
}
}
最后IRQ退出,使用_IntExit来进行上下文切换,切换到新调度的thread中运行。
参考
https://docs.zephyrproject.org/latest/kernel/threads/scheduling.html